Robocat 270の組立編、その2です [空モノ]
連続更新です!
ミドルデッキまで組み付けたRobocatくん、この部分にはバッテリーが搭載されますので、引き続きトップデッキまで組み立てます。(写真撮り忘れました~![[ふらふら]](https://blog.ss-blog.jp/_images_e/144.gif) )
)
んで、トップデッキにいよいよフライトコントローラ(FC)であるCC3Dとプロポ受信機を搭載します。
.JPG)
もともとは両方ともケースに入っていましたが、軽量化と重ねてレイアウトしやすくするため、ケースから取り外して搭載です![[ダッシュ(走り出すさま)]](https://blog.ss-blog.jp/_images_e/164.gif) 。
。
しかし、このレイアウト、なかなか悩みました~。FCにはフライトコントローラシステムをインストールする必要があるんですよ![[ひらめき]](https://blog.ss-blog.jp/_images_e/151.gif)
そのため、マイクロUSBポートを持っているんです。このUSBポートを使って、PCからプログラムをインストールする作業が発生します。
このポートは後々のセッティングにも使うので、USBケーブルを挿しやすく、しかも将来組み込む予定のOSD用ポート等も差し込むエリアを確保する場所をいろいろ悩みながら決定![[揺れるハート]](https://blog.ss-blog.jp/_images_e/137.gif)
近所のホームセンターでΦ3デルリンカラーを買ってきて、10mmほど嵩上げしてその下に受信機を滑り込ませました![[どんっ(衝撃)]](https://blog.ss-blog.jp/_images_e/161.gif) 。
。
.JPG)
んでもって、FCSはCC3Dではメジャーなプログラムである「Openpilot」をインストール~![[ぴかぴか(新しい)]](https://blog.ss-blog.jp/_images_e/150.gif)
うわさではFCとPCの通信で結構苦戦することもあるとのことでしたが、以外にスンナリ進んじゃった![[あせあせ(飛び散る汗)]](https://blog.ss-blog.jp/_images_e/162.gif)
基本設定やプロポとのキャリブレーションもサクサク進んで、いよいよモーターの回転方向を確認しながら組み付けます。
.JPG)
ちなみにモーターの回転方向はこんな画面を参考にしました。
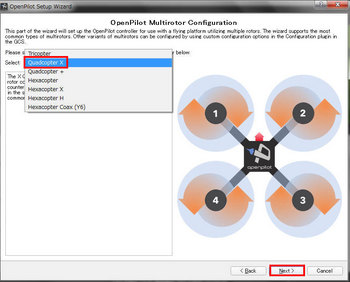
Openpilotのプログラム設定ソフトでモーターの回転が確認できたときはスゲーうれしかった!
ここまでくると残りは簡単です![[黒ハート]](https://blog.ss-blog.jp/_images_e/136.gif)
サイドフレームを組み立てて、ほぼ完成~![[ハートたち(複数ハート)]](https://blog.ss-blog.jp/_images_e/139.gif)
.JPG)
.JPG)
上空での良好な受信状態を期待して、受信機アンテナは上に立てるより水平にしたほうが良いと思って、
.JPG)
こんな感じに処理してみました。
最後にRobocatくんの特徴であるカウルとプロペラを組み付けて、
.JPG)
.JPG)
「完成!!!」
個性を主張したくなって、以前持っていたタミヤ DB01 ドゥルガのステッカーでドレスアップした結果が以前紹介した写真のこれです。

「かっこえ~でしょ!(笑)」
フライト中、前後がつかみやすい様に後ろのアームには透明オレンジの熱収縮チューブでESCを保護してみました。
狙い通り視認性が良くて満足しちゃったりしていますよ~![[わーい(嬉しい顔)]](https://blog.ss-blog.jp/_images_e/140.gif)
今回のRobocat 270くん、こちらのサイトを参考にさせていただきました
http://welovedrone.com/
ホント、非常に詳しく解説されていてすごく助かりました!!
ありがとうございました~
さあ、今度はFPV化に挑戦しますよ~![[るんるん]](https://blog.ss-blog.jp/_images_e/146.gif)
ミドルデッキまで組み付けたRobocatくん、この部分にはバッテリーが搭載されますので、引き続きトップデッキまで組み立てます。(写真撮り忘れました~
んで、トップデッキにいよいよフライトコントローラ(FC)であるCC3Dとプロポ受信機を搭載します。
.JPG)
もともとは両方ともケースに入っていましたが、軽量化と重ねてレイアウトしやすくするため、ケースから取り外して搭載です
しかし、このレイアウト、なかなか悩みました~
そのため、マイクロUSBポートを持っているんです。このUSBポートを使って、PCからプログラムをインストールする作業が発生します。
このポートは後々のセッティングにも使うので、USBケーブルを挿しやすく、しかも将来組み込む予定のOSD用ポート等も差し込むエリアを確保する場所をいろいろ悩みながら決定
近所のホームセンターでΦ3デルリンカラーを買ってきて、10mmほど嵩上げしてその下に受信機を滑り込ませました
.JPG)
んでもって、FCSはCC3Dではメジャーなプログラムである「Openpilot」をインストール~
うわさではFCとPCの通信で結構苦戦することもあるとのことでしたが、以外にスンナリ進んじゃった
基本設定やプロポとのキャリブレーションもサクサク進んで、いよいよモーターの回転方向を確認しながら組み付けます。
.JPG)
ちなみにモーターの回転方向はこんな画面を参考にしました。
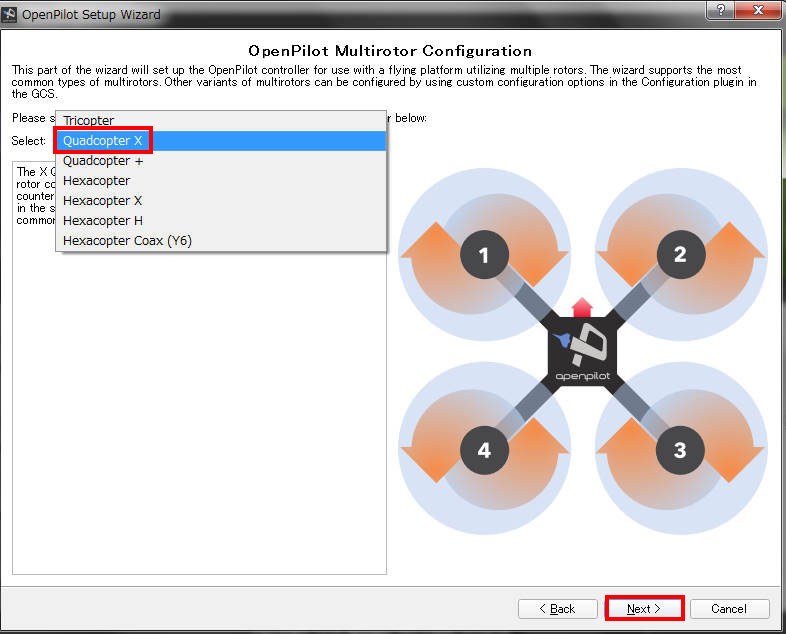
Openpilotのプログラム設定ソフトでモーターの回転が確認できたときはスゲーうれしかった!
ここまでくると残りは簡単です
サイドフレームを組み立てて、ほぼ完成~
.JPG)
.JPG)
上空での良好な受信状態を期待して、受信機アンテナは上に立てるより水平にしたほうが良いと思って、
.JPG)
こんな感じに処理してみました。
最後にRobocatくんの特徴であるカウルとプロペラを組み付けて、
.JPG)
.JPG)
「完成!!!」
個性を主張したくなって、以前持っていたタミヤ DB01 ドゥルガのステッカーでドレスアップした結果が以前紹介した写真のこれです。

「かっこえ~でしょ!(笑)」
フライト中、前後がつかみやすい様に後ろのアームには透明オレンジの熱収縮チューブでESCを保護してみました。
狙い通り視認性が良くて満足しちゃったりしていますよ~
今回のRobocat 270くん、こちらのサイトを参考にさせていただきました
http://welovedrone.com/
ホント、非常に詳しく解説されていてすごく助かりました!!
ありがとうございました~
さあ、今度はFPV化に挑戦しますよ~




コメント 0